About midway through January my whoop started to failsafe intermittently. That means it would randomly lose connection to my transmitter and as a safety precaution shut off and drop to the ground. This is a safety feature, which isn’t as important for whoops like I’m flying as it is for large quads with say 5″ propellers on them, but even some ones like this can be scary if they were to start whizzing around out of control.
I tried taking it apart and seeing if there was anything obviously damaged but didn’t have any luck. So my next stop was to open a support ticket with NewBeeDrone. They got in touch with me the following day and after submitting some photos they asked me to send it back so they could confirm it was defective and then shipped me a replacement a few days later. The whole process was very painless and pretty speedy.
It also helped that I had a backup quad that I had been waiting to start flying. During the run up to the Christmas season, NewBeeDrone was offering a discount on pre-orders for their replacement to the BeeBrain V2 called the BeeBrain Lite. I felt a little bad placing an order when I already knew I had a V2 coming for Christmas, but only bad enough to leave it in the box until I needed it.
The Lite had a faster processor in the flight controller, integrated video transmitter (VTX) so there was no secondary board, and had LEDs. I also really liked the new canopy that it came with over the V2 version.
I improved a lot during my month between flying my original V2 and my Lite. My normal routine on a week night was to get all of the batteries charged, I’d bought more and was up to a dozen 1S 300mAh LiHV so I could fly for about thirty minutes using all of them, and then once everyone was in bed and I had the house to myself I’d turn on all of the lights on the main floor and go.
I got used to flying with acro mode so the quad wouldn’t automatically level out when I released the sticks. While not super important for what I was doing yet, it was helping me develop better habits with the sticks for when I started trying to do flips and rolls.
I also got much better at planning ahead so I was following a line that I had mapped out through the house. This made my flights smoother, although still restricted by the small space so there were some places where I was basically forced to stop and spin around. But I definitely got a lot of practice flying close to walls and furniture. I actually found it interesting to try to get as low as possible. Something about flying into the kitchen just off the floor and and seeing these huge cabinets come up on either side was quite fun and messed with my sense of scale a little bit. This practice also really helped me with throttle control since I couldn’t afford to lost any altitude on a turn which I was doing a lot when I first started flying.
After watching NewBeeDrone’s build tutorial video about a dozen times leading up to Christmas, I figured I was covered for putting it together. The kit was pretty easy with no soldering, just a few screws and plugs. It turned out to be a bit harder than I expected though, because of the tiny tiny tiny screws.
I thought I was set for tools, since all I needed was a #000 Phillips screwdriver, but my set wasn’t magnetized which I didn’t realize was something I would want until it was too late. Getting these tiny screws in with only two hands difficult to do. Later on when I looked into getting some magnetized screwdrivers, I found that websites and packaging at hardware stores are very bad about say whether or not they’re magnetized. Which was frustrating until I happened across a magnetizer at Home Depot for $4 and now my existing screwdrivers are fine.
After assembling the Acrobee, I needed to bind it. The kit uses a BeeBrain V2 (now replace by the BeeBrain Lite), which is an all-in-one flight controller, ESC, and receiver. Binding is the process of pairing the receiver on the quad with the transmitter in my radio. Getting the radio into bind mode is easy, just go into the menu on the Taranis and set bind mode. For the receiver though, it involved pressing a tiny button about the size of the screws I’d already struggled with while plugging in a battery at the same time. I eventually discovered a trick for this. I used USB instead of a battery since the BeeBrain powered the receiver off of USB, and it was easier to plug USB into the quad, press the bind button using a screw driver, and then plugging in the USB to the computer one handed.
Once the quad and my radio were talking to one another, I had to get the quad plugged into my computer so I could get it flashed to the latest firmware and configured. This is where Betaflight comes in.
Betaflight is the firmware that runs on the flight controller (FC). The flight controller is the hardware that converts the inputs transmitted from the radio into commands to the electronic speed controllers (ESCs) for the four motors. So when I tell the quad to roll right, the FC determines which motors need to speed up and which need to slow down. It also handles the on-screen display (OSD) which shows things like battery voltage and received signal strength indicator (RSSI) in the FPV goggles.
Of course I couldn’t just plug the quad into the computer USB and have it recognized right away. I need to find some drivers online but that didn’t work either, which is when I went online and found a Bardwell video that walked me through fixing my problem. Just a quick aside, Joshua Bardwell’s YouTube channel and his FPV Know-It-All site have been great for getting into flying FPV quads. Especially for learning Betaflight and troubleshooting issues. Once I finally had Betaflight installed and able to connect to my new Acrobee, the rest of the configuration wasn’t to far off from the NewBeeDrone Betaflight setup video that I’d already watched a few times.
All told, it took me until late in the afternoon on Christmas Day but I eventually got everything put together, configured, and was ready to fly. I was feeling pretty confident. I practiced a bit in a simulator called Liftoff and figured I’d be able to take off and hover no problem. Just the same as with the toy quad I’d started out with.
Maybe it was because the simulator I’d practiced in had me flying outdoors and was simulating a larger quad with 5″ propeller, instead of nano-sized quad with 30mm props, or maybe it’s just a simulator vs real world thing, but I struggled a lot for the first couple of hours to even take off an hover let along zip around the house like I’d imagined.
When I’d give it enough throttle to take off, it would shoot up, and then I’d back of and it would plummet to the floor. I tried a lot of different things that day in adjusting the configuration in Betaflight and doing a lot more research, but I’m not really sure that did much to improve things. I think it just came down to getting enough practice in. Eventually I had enough stick time in that by that evening I was able to get around the house.
Watching that video to put together for this post was a little painful for me. I see so many mistakes now that I didn’t realize at the time. The virtual current meter which is displaying the milliamp hours (mAh) used is totally wrong, and I’ve since gotten used to knowing when to land based on the voltage instead. Flying the battery down to 3.2 volts instead of 3.5 which hurts the lifespan of the battery. Using angle mode (the STAB on the OSD) instead of acro or rate mode. For whoop racers angle mode is actually pretty common, but as someone who was planning to get into larger quads once Sprint came around and do more freestyle flying, it’s a good way to get into some bad habits. Angle mode will level the quad once a stick is released, and doesn’t allow for doing tricks like flips and rolls.
Beyond the software stuff, I really notice now how little planning I’m doing. There’s no line that I’m following as I go around the house, which exacerbates my roughness on the controls and issues with keeping altitude on a turn.
I’ve since realized that I went about this all the hard way, but I really didn’t have much choice given the timing. Starting out indoors is much more difficult than learning to fly outside because there’s more space to make corrections. But given I was learning to fly in the dead of winter when there was quite a bit of snow on the ground, I didn’t have a lot of other options, and I certainly didn’t want to wait for better weather.
Thing One got a toy drone for his birthday. A simple and inexpensive one with an internal battery and a remote. I helped him get it charged up and ended up flying it more than he did during his birthday. I ordered a second one for myself before the end of the day, and after flying it for about a week I was starting to get frustrated with only being able to fly for about two minutes before having to wait half an hour for it to charge. So of course I headed off to Amazon to find something better.
Father & Son’s First Drones
I hadn’t looked at drone very seriously before then, so all I really knew about them was the high end ones like the ones made by DJI that are intended for aerial photography. The toy quadcopter market had really exploded though, and there were tons of options to research online. Although it didn’t take me long to realize that I wasn’t going to find something with a longer flight time. For the quadcopters that were small enough to fly indoors, battery weight would keep the flight times down to the two minute range. So I needed something with a swappable battery.
Once I knew more about what kind of quadcopter I was looking for, I started searching for reviews on YouTube which is where I stumbled onto the concept of FPV, or first person view. An FPV quadcopter has a camera and a video transmitter (VTX) in it that sends to a pair of goggles that the pilot wears and this allows them to see and fly as though he was inside the quadcopter.
I immediately wanted to do this. I was really taken with the concept of being able to sit in my dining room and fly a quadcopter all over the house without having to follow it around. Even better I could fly around outside and actually be able to get a birds eye view.
My dad has been into RC planes for a few years now, and he’s tried to get me interested in them before, but I’ve never been a fan of flying them line of sight. The plane is tiny and hard to see once it’s up in the air, and I just feel to removed from the experience to have much fun with it. FPV solved all of that, and quadcopters meant I didn’t have to go to a field somewhere but could fly in my house or around my yard.
Eventually I discovered a specific class of micro-drones called Tiny Whoops. This seemed like the perfect entry point for me. They are extremely small and ducted so they’re safe to fly indoors around people and pets. After looking into my options I settled on the NewBeeDrone Acrobee as it was one of the only kits I looked at that didn’t require soldering.
NewBeeDrone Acrobee V2
The next trick of course was getting my wife’s approval, FPV isn’t a cheap hobby to get into. There’s the done itself, which ironically was the cheapest part at about $99. After that I still needed goggles and a transmitter. The goggles can run anywhere from $100 to $600 depending on the style, brand, and receiver options. The transmitters can be as cheap as $50 but I had my eye on one a little more expensive at $200. So even with goggles on the cheaper end of the spectrum I was looking at spending about $500 or so to get into the hobby and I didn’t feel right doing that without talking to her first, especially not in November with the holidays coming up.
Which is how I ended up shopping for myself for Christmas last year. I ordered as Taranis QX7S radio, an Acrobee V2 Kit that included props, a set of batteries, and a pair of EV800D box goggles.
Box goggles aren’t as compact as regular FPV goggles but they’re much less expensive. I got mine for for $109 versus spending $450 for a pair of regular goggles like Fat Sharks where I’d need to spend another $50 to $100 on a receiver module.
The only downside of this plan was waiting for Christmas day to get started, I don’t think I’ve looked forward to a Christmas morning so much since I was in middle school. In the weeks leading up to then I had tried to watch as many videos as I could about assembling the Acrobee, setting up the Taranis radio, and getting them configured to work together. I thought I was pretty well prepared and ready to go, but I found out pretty quickly that I had a lot to learn.
It’s been a while, four years actually, since my last post celebrating the end of my seventh year on the blog. Obviously my plans at the time to set a writing reminder and do one or two posts a week didn’t succeed.
What started as one of my normal slow gaps turned into a January where I didn’t have much to say about the last years games or upcoming games and just went on from there. Not just with the blog either but my time on Twitter dropped off in the last few years too. I’d find myself browsing Reddit much more often when I had some time to kill. Eventually I started using Instagram a bit as well, but it seemed like any time I would check in on Twitter that were a lot of conversations going on that I didn’t have anything to contribute to or were over hours before I was reading them.
MMO’s have always been one of the primary drivers for getting me to write, and were the reason why I started the blog in the first place. So once my interest in MMO’s dwindled to logging into Star Trek Online occasionally, the main driver for me to go online and write was gone. There’s such a time commitment required and getting back up to speed in an MMO after an absence often seems like learning a new game, that I’d never play for long.
So, why am I back now?
I’ve started to write posts like this two or three times over the last four years, but I always came up with some excuse and put it off. Recently I’ve been back on Twitter more and feeling more engaged in the online conversations. I’ve also gotten into flying quadcopters over the last ten months, and I’ve been wanting to write about my experience of getting into that hobby. It’s not the kind of thing that fits into a tweet no matter what the character limit is up to now.
The other big motivator was my original site host was acquired by a company I try to avoid, and my hosting plan was coming up for renewal. So I needed to decide if it was time to just shut the site down or I should put the effort into finding a new host and migrating the site over.
Of course, it remains to be seen how it goes, but I have some ideas already and I’m hoping I can capitalize on my productive bursts to get a buffer of posts scheduled. Since I’m primarily planning to write about my adventures in FPV drones, I can work ahead as much as I’d like.
Today marks the end of the seventh year of the blog. I say this every year, but it’s crazy to me that the blog is still around after so long. Of course just like last year, my posting has been sparse outside of Blaugust, so the blog is really barely around. I’m at the point now where it’s nice to have an outlet when I need one, but I don’t feel guilty when I look at the site and see it’s been four months since I wrote anything.
I’m not saying that I expect to fall silent until next year though. I’ve got a weekday reminder to write something set on my phone and that has worked more often than it hasn’t in September. My hope and my goal is to keep that up with two or more posts a week depending on what I’m doing and how much I have to say. If nothing else I expect to have regular KSP mission reports.
Thanks to everyone who’s stopped by to read or comment, I’m looking forward to seeing what the next year brings.
Things 1 and 2 watch me play Kerbal Space Program occasionally and I’ve been trying to get them interested in space by showing them YouTube videos of real rocket launches and interviews with the astronauts on the space station. Somehow last week the topic of model rockets came up and it got me thinking about trying that out, because of course I need yet another hobby.
I stopped by the local hobby store on my way home last Friday and picked up an Estes rocket kit, engines, and recovery wadding. Model rocket kits come in various skill levels. The one I picked up was an E2X, which means easy to assemble, and basically just required gluing parts together. There’s two levels below that RTF for ready to fly and ARF for almost ready to fly which require no or very little assembly, and then there’s Skill Levels 1 up to 5. The E2X was about perfect for the level of effort I wanted to put into things. It required some basic assembly skills and model glue. I was able to put both rockets and the launcher together in about an hour.
On Saturday my dad and I took the boys to a nearby nature preserve (basically a field/trail left to grow wild) that was usually not busy and picked a corner to set up the launcher in that would put us upwind of an open field. We started with the smaller of the two rockets, the Sky Dart, and had three great launches. Unfortunately the orange streamer come off on the first flight. We were able to track it and recover it on the second launch and should have stopped there until I could get some orange tape or ribbon to replace the lost streamer. The third launch neither my dad nor I could track after it went up and we never were able to locate where the rocket came down. The weather started to sour on us about than anyway, so we packed up and headed home for a few hours.
When things cleared up in the afternoon, I came back with just Things 1 and 2 to try out the remaining rocket from the kit, the Farside. It was quite a bit larger and had a parachute on it, so I figured it would be easier to track and recover.
The first launch I forgot to take the little orange cap of the top of the launch rod. The rocket took care of that for me, but it only went up about 20 feet and it veer sharply to the right. So it turns out our position with respect to the wind was good for more than just keeping the rocket from landing in nearby trees, as it kept the misfire headed away from us rather than towards us. The boys of course thought it was hilarious.
The second and third launches went great. The Farside didn’t get the same altitude as the Sky Dart and was far easier to track even without the parachute. I had some issues getting the parachute rolled up right. It deployed fine on the second launch but seemed too tangled on the third and final launch. There’s definitely some skill with that and getting the recovery wadding packed right inside the rocket. The wadding is important as it’s a non-flammable kind of tissue paper that is supposed to protect the chute and nose cone from the second charge that fires after the rocket launches. This charge is supposed to pop the nose cone off and push the parachute out so it deploys near the apogee of the flight path. The problem is if you put too much in, then the chute might not fully deploy. Put in too little and you can end up with a brown singe spot on your parachute. So there’s definitely some skill there that I need to practice.
It was a lot of fun and unlike some of my hobbies, doesn’t require a lot of time at least at the level I’m currently at. I’ve already ordered a small rocket to replace the lost Sky Dart and a bunch of new rocket engines. I’m looking forward to flying them again soon.
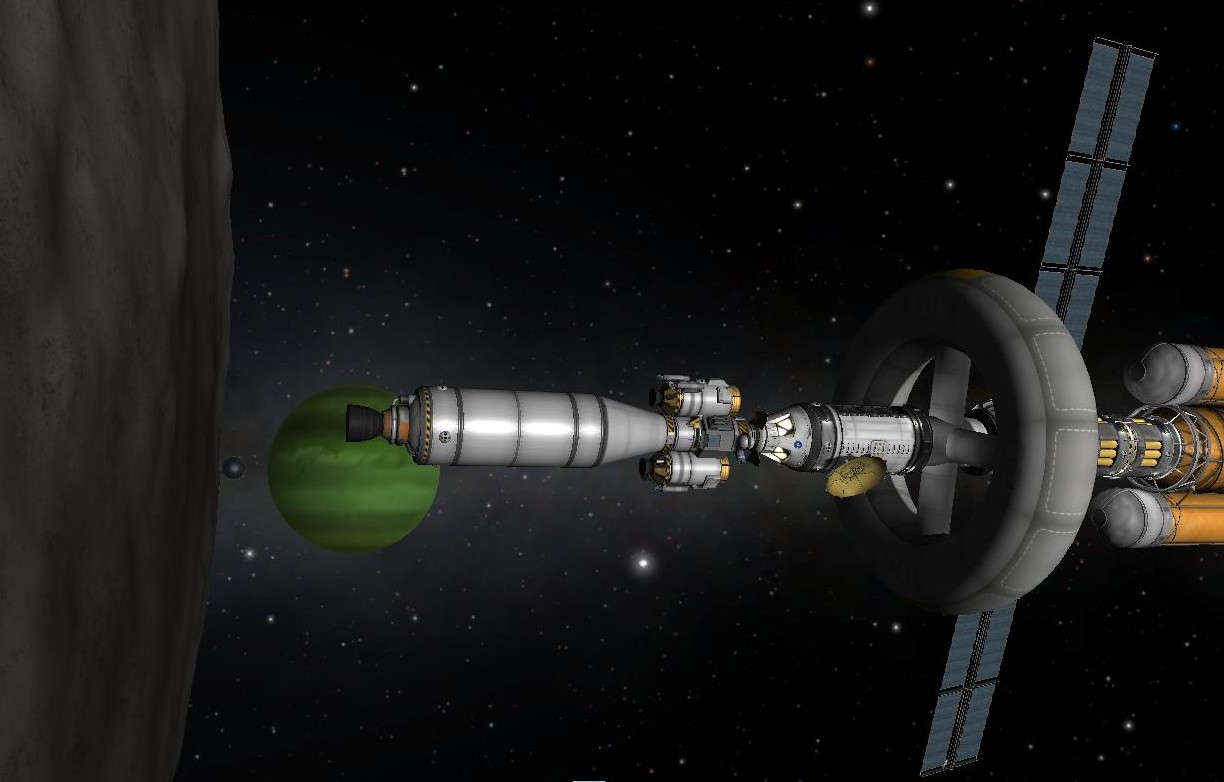
Over the weekend I returned to my Jool exploration mission and got the Explorer transferred from Tylo to Bop.
It took about two hours of real time and required three burns. A 10 minute burn to leave Tylo, a 6 minute burn to match inclination with Bop’s orbit and get an intercept, and a final 6 minute burn to get into orbit around Bop. Docking turned out to be easier than I expected but was quite slow.
Overall I’m pretty disappointed with the VASIMR engine on the ship. I tried an alternate design in the VAB with two reactors and engines which did help with the TWR of the craft but not enough to offset the hit to the available deltaV. Instead, I’ve started looking at a new version of the Explorer that uses nuclear engines. The current design looks very promising. It has better TWR and roughly the same deltaV. The ship is smaller because nuclear engines run on liquid fuel not hydrogen which takes more volume, and there’s no nuclear reactor required which saves a lot of mass as well.
Speaking of mass, I drastically overestimated the amount of supplies I would need for the crew. Or really I under estimated how well the hydroponics modules would do at recycling waste. Three years into the mission, and the crew still has a full set of supplies. The next mission should easily be able to get away with half the number of supply containers or more.
So now that the Explorer is docked at the refinery I have to make a decision about whether to cut the mission short and return to Kerbin or continue on to Pol, Laythe, and Vall. I’m leaning to cutting things short and coming back to Jool with a redesigned Explorer with better TWR. Either way, I can send Jeb down to the surface as planned and then leave the lander at the refinery.
Midnight, released yesterday, is the eighth and final episode of the Iconian War story arc in Star Trek Online. I got a chance to play it last night, and I think it’s my favorite episode in the entire game. It felt like a good TNG episode. I don’t want to spoil the mission for anyone but let me say that this entire arc has been great for resolving plot lines that were left hanging in TNG and Voyage.
Congratulations to Cryptic not just for a great episode but for finding a good release cadence for story missions. This year had seen a lot of quality new content released. Having a combination of monthly new episodes with rewards becoming available on a weekly basis to promote replays strikes a nice balance of giving players new content without overloading the developers. I can’t wait to see what’s coming with the next Season.
If you miss having Star Trek on TV, you really should give the game a try. The only downside is that the Iconian War arc is for level-capped players, but it’s possible to get to 60 pretty quickly between XP boosts and the Duty Officer system.
Continuing my extended weekend in KSP, I left off yesterday with the crew of the Jool Explorer 1 starting their two year journey to the outer edges of the Kerbol system. I time warped the game through most of that journey, slowing down to complete a few research missions and check in on a science lab in orbit around Kerbin’s second moon, Minmus. I use a mod called Kerbal Alarm Clock which is invaluable when running multiple missions at once. It does just what it sounds like it does. I can set alarms for various events like a ship is coming up on a sphere of influence change or a maneuver node. In this case I had an alarm set to remind me when the JE1 was getting close to Jool’s gravity well.
Getting to your destination is only half of the challenge for interplanetary travel. You also have to slow down somehow to get into orbit. In the above picture the solid blue line shows the trajectory of the JE1 coming into the Jool system and then escaping. Not only that, but the ship would have picked up a little velocity because of how it was passing Jool. In previous versions of KSP, the easiest way to get into orbit of Jool was called aerobraking, and involved dipping into the upper layer of Jool’s atmosphere and using that to slow down. In the current version that just causes you ship to overheat and explode. Instead of using atmosphere, it’s possible to use gravity. Jool has three decent sized moons with nearly Kerbin levels of gravity, which makes them excellent candidates for this.
In the map screenshot above there’s a maneuver node at the top left of the blue orbit which creates the new dotted orange orbit. That orbit intersects with Jool’s third moon Tylo (which is highlighted in a peach color). Because the JE1 comes in on the backside of Tylo’s orbit, instead of picking up speed the craft instead sheds it, and after exiting Tylo’s gravity well the JE1 will be in the third green dotted orbit. This let’s me get the JE1 into an elliptical Jool orbit for only 73 m/s, compared to spending 250 or more burning on the periapsis marker of the blue orbit.
This kinds of stuff is very cool to me and one of the reasons why I enjoy KSP so much. Of course it’s fun to launch rockets, fly planes, and blow stuff up, but I have really enjoyed learning about orbital mechanics and getting a deeper appreciation for the science and work involved in space navigation.
Finally in orbit of the Jool system, it was time to transfer to the moon Tylo and the initial moon landing. The Tylo rendezvous wasn’t difficult, but it was pretty tedious. First I had to push JE1’s periapsis out to intersect with Tylo’s orbit for 418 meters per second delta V which was about an 8 minutes and 30 second burn. Second, I needed to match inclination with Tylo, so we were orbiting at the same angle, which was another 192 m/s and 4 minutes. It’s not strictly necessary to match inclination but it makes rendezvous far easier to do and I’ve never had any luck without doing it. Lastly I needed to wait two orbits and then burn to bring down my apoapsis (point an orbit furthest from the center) to match Tylo’s orbit, which required 183 m/s and a 3 minutes 47 seconds burn. Again, time warp can’t be used while the ship is under acceleration, so I had about 16 minutes of real time waiting to sit through.
While it was really nice to have a design that included so much delta V, it hasn’t really been offset by a much lower TWR, which is why all of these maneuvers were taking so long. I’ll probably not be using this same design on my next big ship. Despite the slight frustration over waiting, I was finally in orbit around Tylo. The first really exciting part of the mission was about to begin.
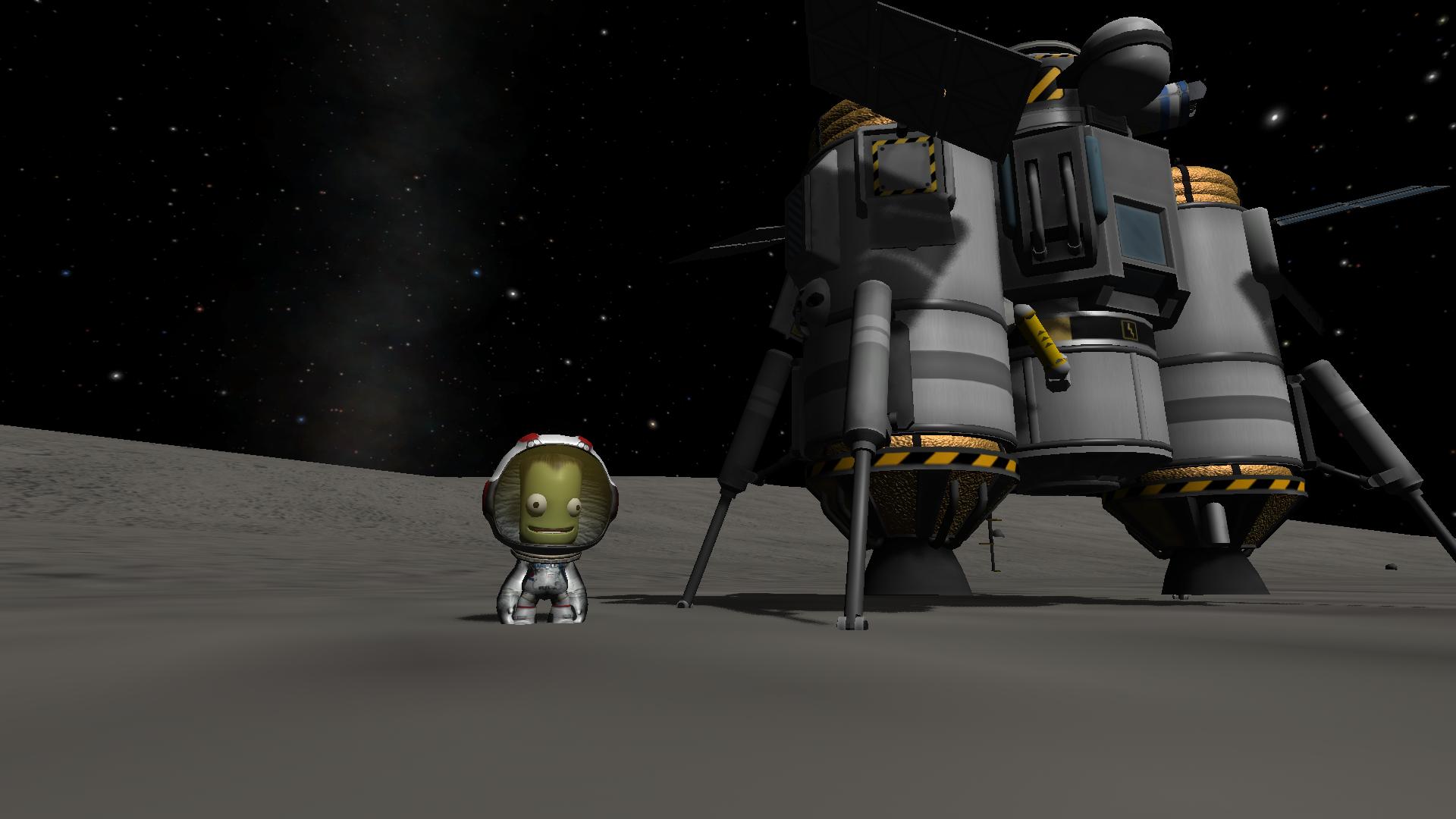
Jeb transferred over to the lander and undocked from the Jool Explorer. After making a save point, because nothing ever goes right the first time, Jeb made a small burn to bring his orbit down close to the planet above a landing site that  I selected semi-randomly. My only criteria was to get a different biome than an earlier probe mission so that I could run a full set of science experiments. After passing around the far side of the moon and making a second burn, I create a maneuver for the deorbit burn and waited as the Jool 5 Lander came back around to the daytime side of Tylo.
The deorbit burn was 1,495 meters per second, which was 67% of what I had in the descent stage. My plan had been to use that stage for most of the descent and jettison it just before landing. I had a minor moment of panic though because I wasn’t sure how much I would need before actually touching down. In the end I had almost a perfect amount. The remaining 33% was enough to keep my speed down for most of the descent after the deorbit burn finished. I ended up jettisoning the main descent stage and using about 460 m/s of my ascent stage touching down on the surface. But I had budgeted a few hundred extra meters per second on my ascent stage just for that reason. I thought it might be close, but I was pretty confident Jeb wouldn’t be stuck on the surface.
This Tylo landing was one of the more intense things I’ve done in KSP recently. It reminded me quite a bit of when I was first learning to do Mun landings and orbital docking. Trying to keep track of remaining fuel, heading, and descent velocity all while the surface is rushing up to meet you. These are some of the most exhilarating and rewarding activities I’ve ever done in gaming.
After planting a flag and running some experiments, I was a little anxious to get Jeb back into space and see if I could get him docked up with the JE1. Taking off from a moon with no atmosphere is pretty straight forward. You throttle up and point the craft to the east at a 45° pitch. East because then you get to add the rotational velocity of the body you’re on to your orbital velocity, and 45° is a good rule of thumb although you can always go lower or higher depending on the terrain.
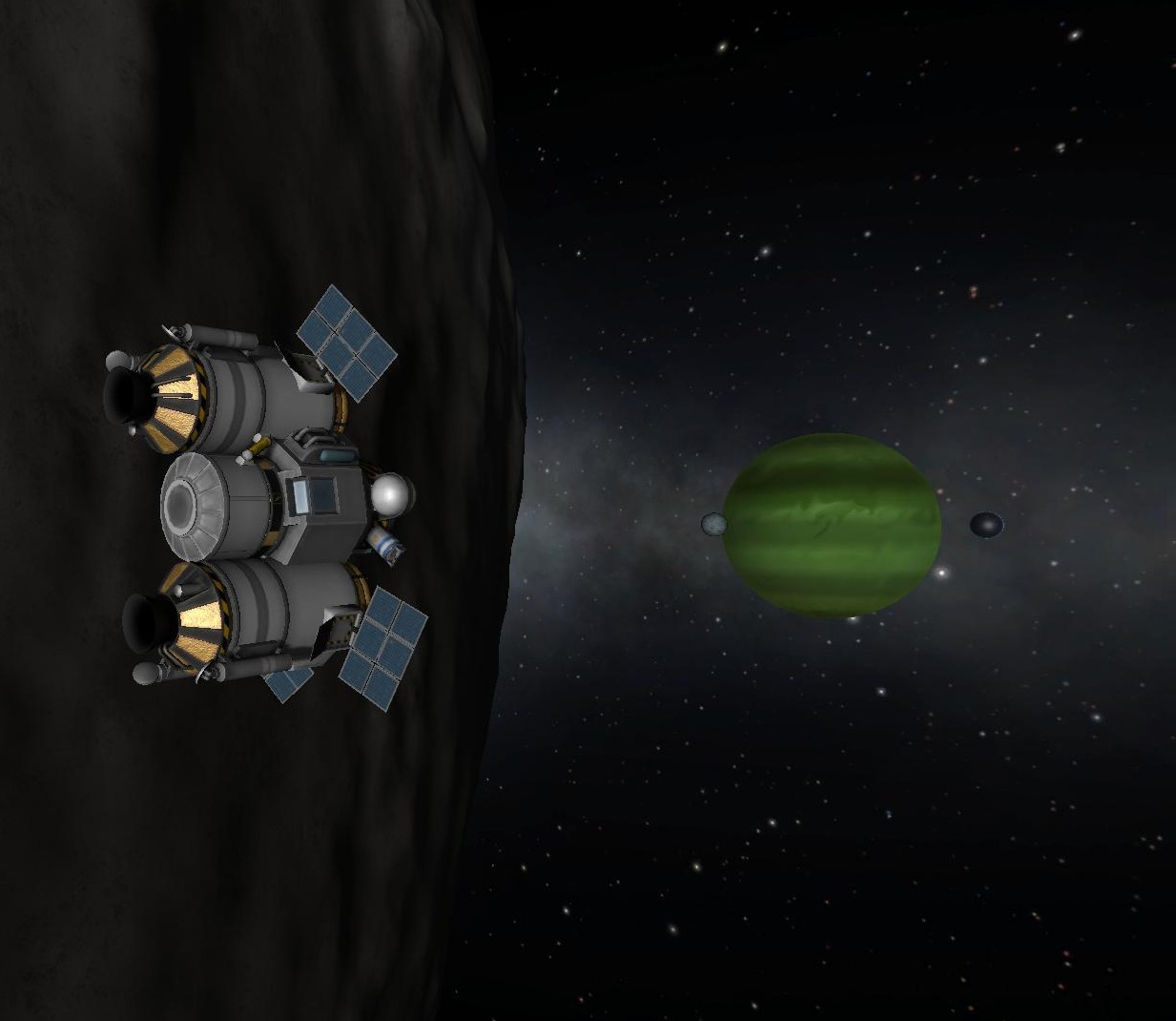
It turned out that my fuel situation was a lot tighter than I realized. The Jool 5 Lander ended up in a 53.5 km by 17.5 km orbit with only 34 m/s fuel remaining. That’s not much, but this was after I had already gotten an intersect of 2.9 km with the Jool Explorer, so all I really needed was for my relative velocity to not be too much over 34 m/s when I got to my rendezvous point. I still have a bunch of monopropellant for RCS thrusters, but those aren’t create for slowing down more than 10 m/s or so.
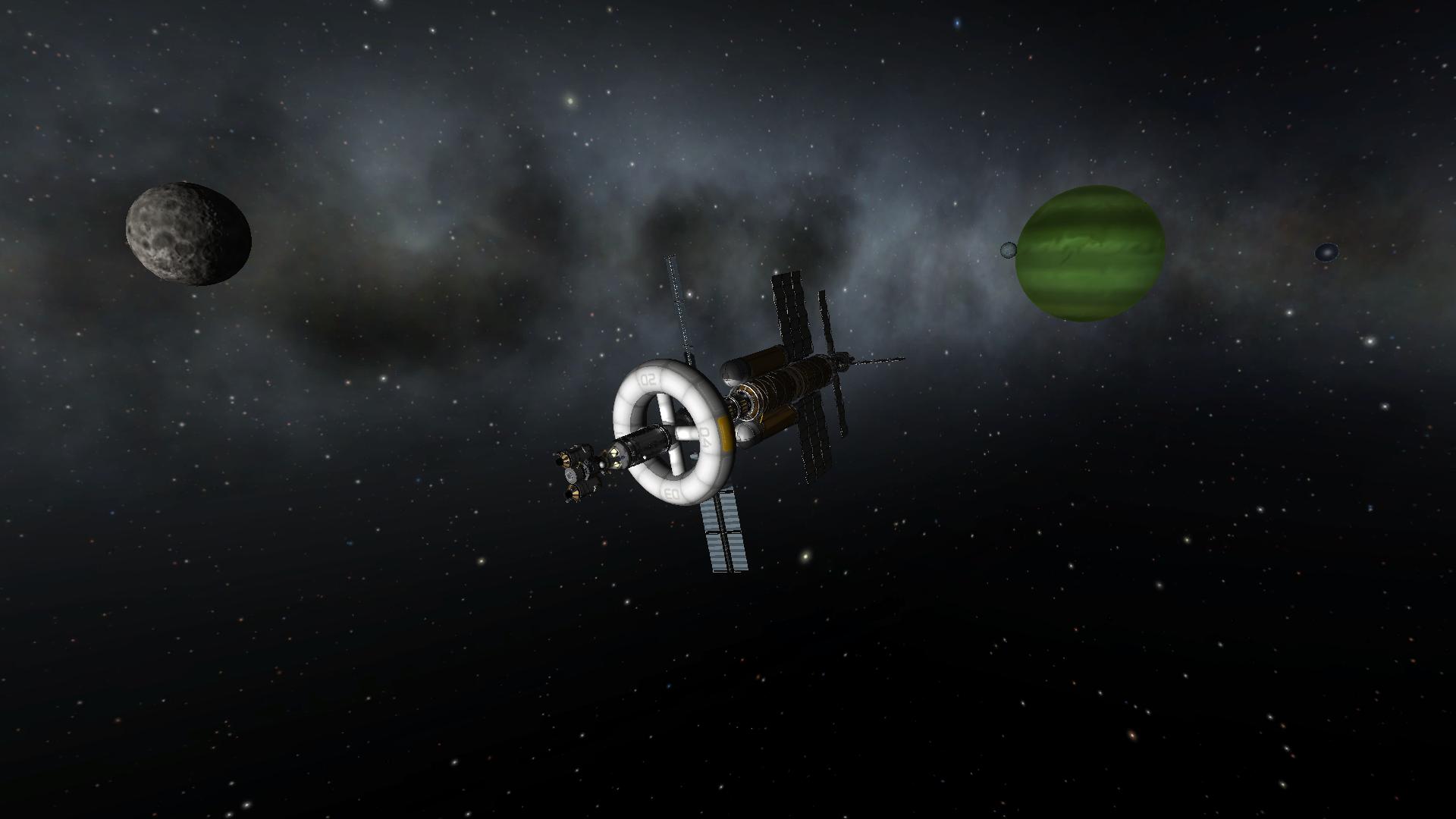
Tylo with Jool and it’s moons Vall (left) and Laythe (right)
After a last orbit of Tylo, Jeb’s Lander intercepted the Explorer and had a relative velocity of 45 m/s. Ideally it would have been 34 or less, but the remaining 11 m/s after I exhausted the lander’s fuel was easy to take care of with RCS. Docking went smoothly and then Jeb transferred back to the Explorer’s crew module bringing along all of the science he’d collected on the surface.
The next stage of the mission was to head to Laythe and land, but I ended up using more hydrogen than I expected getting from Kerbin to Tylo. So instead the crew of the JE1 will make for Bop which is where the orbital refinery that I had previously sent out is located. Bop is inclined and the fourth moon in the system, but it has very little gravity which made more sense for mining operations.
My intentions going into the weekend were to launch my Jool exploration expedition, meet up with my local Golem Arcana group, and restart on my multi-tasking experiment. Two out of three isn’t bad right? I ended up playing two Golem Arcana matches using my Dread Vanguard army, winning both so my Ashmogh remains undefeated, and playing a lot of Kerbal Space Program. A lot. Maybe 20 hours worth? I wish Steam showed detailed play statistics. Raptr kind of does, but it’s not as good at that as it used to be. As a matter of fact, if I think about it Raptr is past the point where its usefulness to me outweighs its memory footprint. I should probably find an alternative that just tracks gaming time.
Crew Transfer
The last phase of preparation for my Kerballed Jool exploration mission was to send up the crew and perform some minor structural maintenance.
The transfer vehicle was designed to send up a three Kerbal crew, the standard pilot, engineer, and scientist complement. It also had a probe core so that it could be remotely piloted and set to rendezvous and dock with the space station in orbit while the Jool mission was underway, and then be reused to bring the crew back Kerbin-side when they returned.
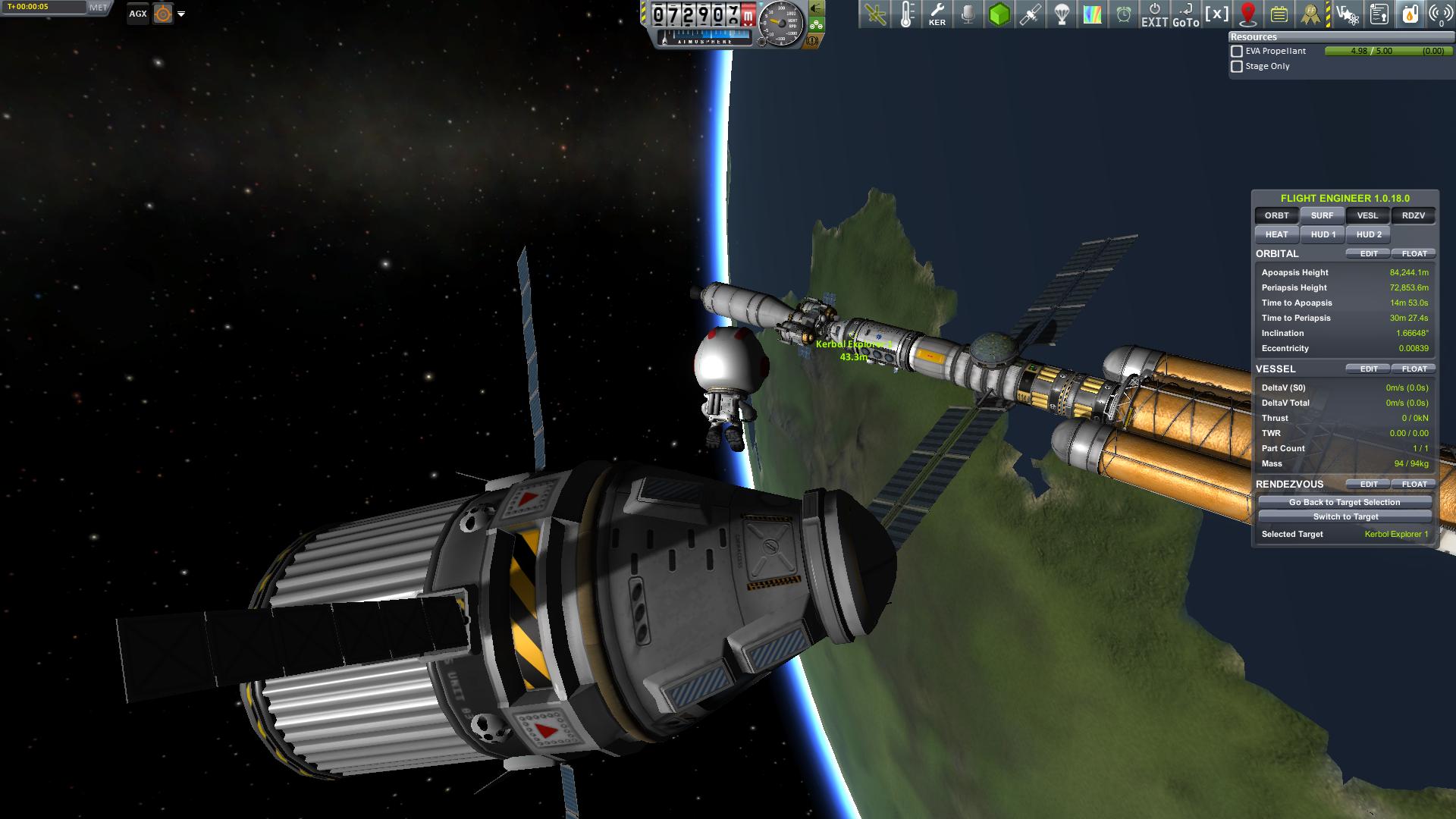
The crew launched at night in order to have the shortest rendezvous with the Jool Explorer 1. That means most of the launch and rendezvous was in the dark so there isn’t much in the way of pictures from that part of the mission. The actual crew transfer took place in the daytime as EVA’s, since there’s only one docking port on the Explorer and it was in use by the lander.
Our pilot, Jebediah Kerman, enjoyed the whole process a little too much.
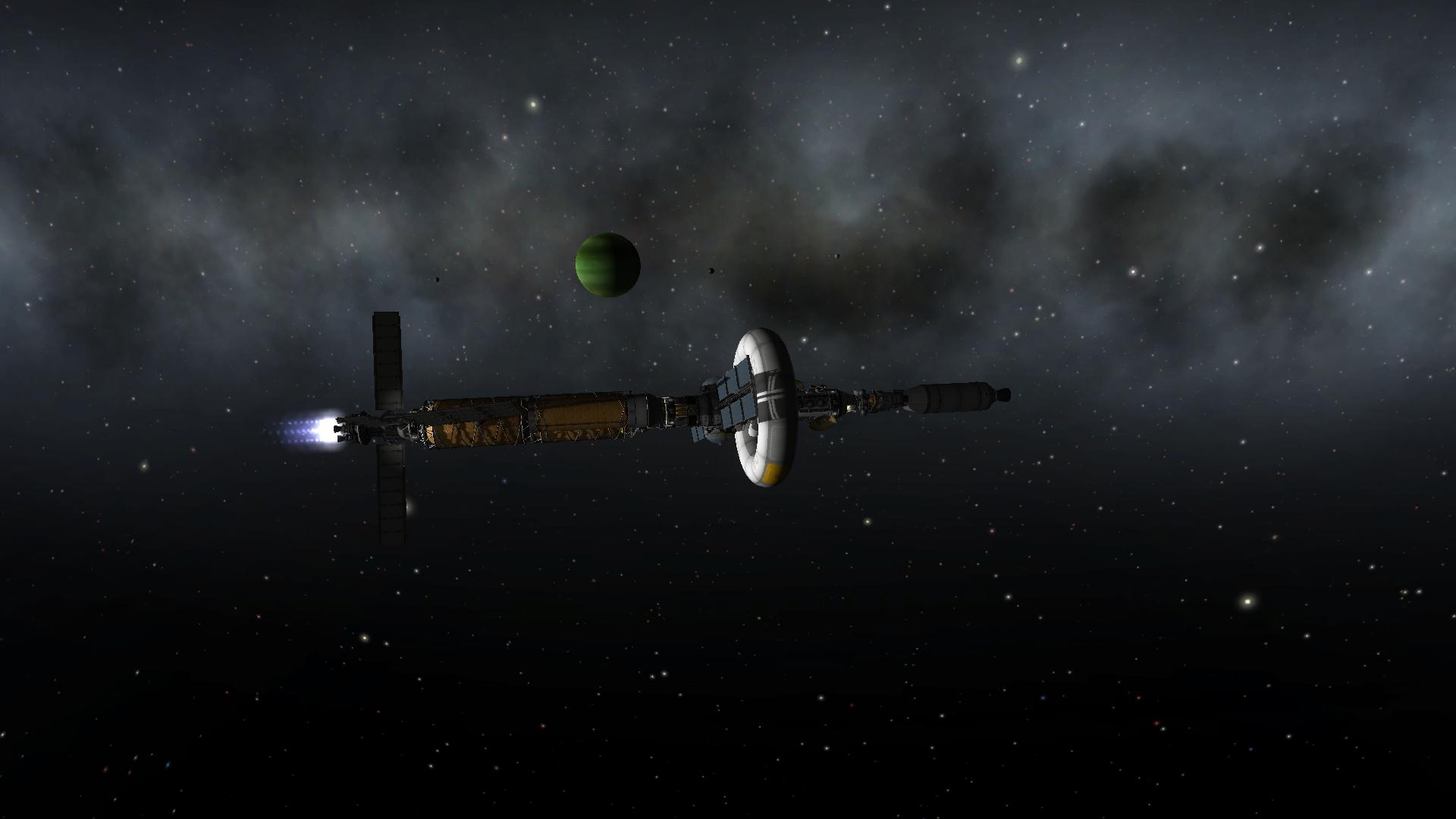
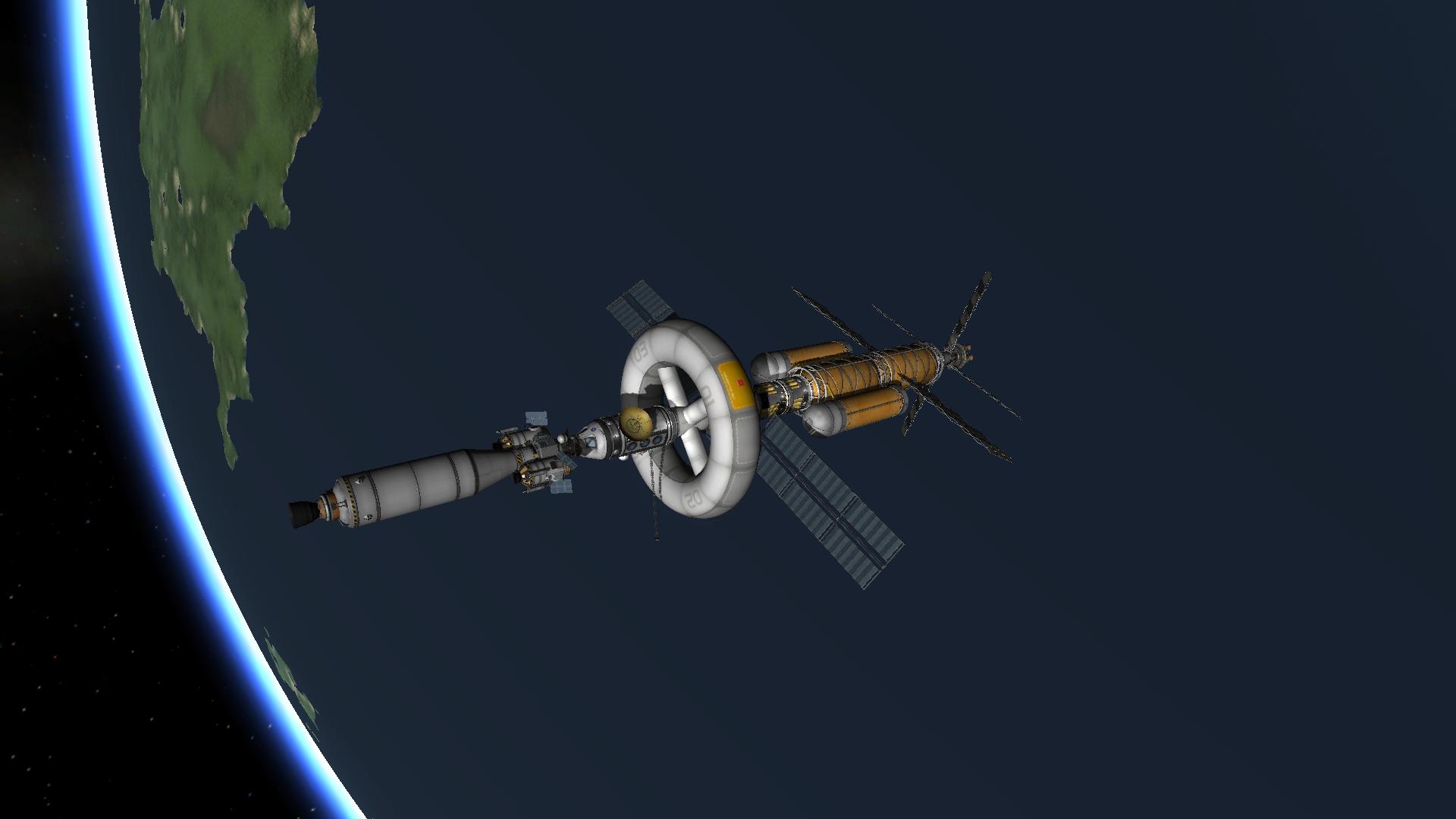
With the crew aboard and some struts applied to the docking connection between the crew and engine modules by the ship’s engineer, Bill Kerman, it was finally time to deploy the habitat ring, heat radiators, and fire up the nuclear reactor.
This was my first time using such a large ship as well as a VASIMR engine. With a TWR (thrust to weight ratio) of 0.10 I was expecting it to be slow to get underway, but I wasn’t really prepared for how slow. I was also surprised that the Kerbal Engineer Redux (KER) mod that I use to provide flight details wasn’t working correctly with the VASIMR engine. After plotting a maneuver to transfer from Kerbin to Jool, the built-in numbers were telling me the burn would take 27 minutes while KER was saying 6 minutes and 28 seconds. Sadly KER was wrong. It also meant that I had to break the 27 minute burn down into 4 to 6 minute chunks, which was about the maximum length I could burn at my current altitude without causing my orbit to dip into the atmosphere.
So for about five orbits I would start burning at three minutes before the periapsis (lowest point on my orbit, and the most efficient place to burn from) and keep it up for six minutes total. KSP doesn’t allow time warping while a craft is under acceleration either, so I had to do all of the burns in real-time. Well that’s not totally true, KSP does allow for physical warping by a factor of 2, 3, or 4 times but physical time warp can do very bad things to a large craft and I didn’t want to risk it. Eventually the maneuver was completed and my Kerbals were finally on their way to Jool with the trip set to take roughly two years and 48 days.













 , released yesterday, is the eighth and final episode of the Iconian War story arc in Star Trek Online. I got a chance to play it last night, and I think it’s my favorite episode in the entire game. It felt like a good TNG episode. I don’t want to spoil the mission for anyone but let me say that this entire arc has been great for resolving plot lines that were left hanging in TNG and Voyage.
, released yesterday, is the eighth and final episode of the Iconian War story arc in Star Trek Online. I got a chance to play it last night, and I think it’s my favorite episode in the entire game. It felt like a good TNG episode. I don’t want to spoil the mission for anyone but let me say that this entire arc has been great for resolving plot lines that were left hanging in TNG and Voyage.