
It was a nice day and I was flying from my backyard while the kids’ were playing on their trampoline. I’d just started my fourth pack and was flying around the front of the house when my nose started to itch. What I should have done was landed to take care of it, but what I actually did was try fly one-handed and take care of it. I believe the words “real quick” passed through my mind. I ended up with me drifting into the side of the house, bouncing off, and crashing.


I knew I was in for some problems though because right after that the feed to my goggles went blue. I’ve never had that happen before. That can only be bad though.

Static usually means that the VTX is dead. A black screen with the on screen display means there’s a problem with the camera. But a blue screen was new to me, so I wasn’t sure what the problem was.
I tried unplugging the battery and plugging it back in, but got the same blue screen in my goggles. Taking off the canopy, I didn’t see any damage to the wires from the flight controller to the video transmitter or from the VTX to the camera. I tried the battery again with the canopy off and didn’t see any difference. Taking the VTX out of the canopy didn’t help either. I accidentally notice that if I squeezed the VTX between my thumb and index finger the picture would pop back in briefly. So I started looking more closely at the board and finally figured out the problem.

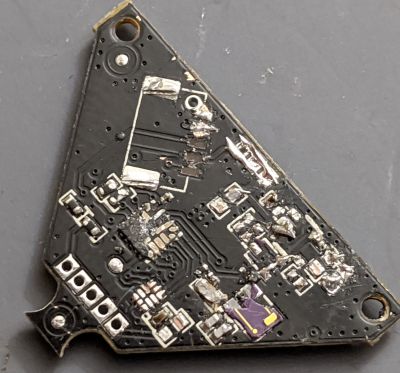
The red arrow is pointing to a tiny brown and silver rectangle. That’s a capacitor. Here’s a closer photo.


So the crash had knocked that capacitor partly loose. Whatever it’s purpose it was allowing the VTX to transmit enough that my goggles were picking up a signal but not actually sending any OSD or the camera image. It was also far, far too small for me to try to resolder. I did try to put some liquid tape over the area, thinking that might hold it in place, but it was so small that just putting that on the board moved the capacitor.
I’ve really had a hard time with this A01 VTX. More so than anything else that came on the HX100 originally. But I’m not sure I can blame this one anything other the me being stupid and having to bad luck to crash into a landscaping timber. Regardless of the cause though I was ready to try something else.
I’d never been a fan of the soldered on antenna connection for one, especially since it came with a dipole antenna and I used left-hand circular polarized antennas on my goggles and my whoops. So this was a change to upgrade the VTX antenna as well as the VTX itself.

I’d been pretty happy with the Eachine Nano that I’d used in my brushless whoop build, and had bought a second one as a spare, so I decided to use that as a replacement. The trick was figuring out how I was going to mount it in the quad since it’s rectangular shaped and wouldn’t mount in the canopy in the same way. I also didn’t want to try to stick it to the flight controller with double-sided tape. After a bit of fiddling around trying to decide how to mount it I had the idea to strip all of the components off of the old A01 VTX board, mount it in the canopy, and then stick the new VTX to it.
I had to rewire things a bit since the new VTX didn’t have a camera passthrough on it like the original one. So I could run the 5V and ground from the VTX to the camera, but had to splice in a new wire from the camera to the flight controller (the yellow to blue signal wire below).


Once the new wiring was figured out, I just had to solder everything back onto the flight controller, which by this point is pretty routine for me. Plugged in a battery to test that I could see a picture in my goggles and that I was able to change the VTX band, channel, and power from the OSD. Then I put heat shrink on the VTX to both isolate it electrically from the old VTX I was going to mount it to and also to hold the antenna on. This board uses a UF.L connector which is very light but isn’t the most secure, so I like to have the heat shrink on it to help make sure it doesn’t go anywhere.

That did require an update to my canopy mod though, since the new antenna wouldn’t fit through the old hole that I’d drilled. So I clipped the end just a bit to allow the antenna to slip through. I debated drilling a hole through the end that I could zip-tie shut, but so far it’s seemed pretty secure without it.

So now I have a further modified HX100. I think at this point maybe one or two motors, the canopy, and the camera are the only original parts. Most of the problems I’ve had with it have been due to crashes and my own stupid mistakes. It’s definitely been my favorite quadcopter to fly.





























































