One of the things that I use the most in flying quadcopters that i didn’t anticipate is zip ties. I was flying over the weekend and towards the beginning of the session I knocked my goggles off of the tailgate of my truck and they landed on the patch antenna on the ground.
Thankfully the actual antenna was fine it was just the plastic case the broke. The plastic wouldn’t snap back in place though, so I got some zip ties out and used two to wrap around the antenna case and hold it together. At some point I should probably glue it together, but for now I like how they look with the zip tie repair.
Besides making quick repairs, I’ve used zip ties in quad builds for the receiver antenna wires. They provide just enough stiffness while staying flexible especially with a heat shrink tube over it to keep the antenna in place. Plus I run the antenna under the zip tie so if they do get hit by a prop then it’s the zip tie that takes the damage and not the antenna.
I also recently did a rebuild on my bigger 3″ Acrobrat frame where I was trying to get the VTX and receiver antennas better separated in order to see if the video signal would be cleaner. I removed the old 3D printed mount that had been holding the receiver and VTX antennas, then moved the receiver towards the front of the craft and mounted it’s antennas off of the frame with zip ties like I’ve been doing for my other builds. At first I wasn’t sure how I was going to mount the VTX on the back, the 3D printed mount had the antenna close to the body and I think it was getting blocked by the battery. I ended up using a pair of zip ties to hold it in place on one of the rear cross braces, and I’m pretty happy with how it looks and how secure it is.
I’m back after taking a little break from the blog. I didn’t quite take a break from flying but I did scale way back. For reference in May I flew 14 sessions and in April I did 19. In June, I only flew four days. So I pretty much just took the month off. Yesterday I flew 10 packs and really enjoyed myself.
Last I posted I was feeling stuck in a rut and I was trying to mix up my flight sessions and spend more time in intentional practice of maneuvers that I’m not as comfortable with. I still did a lot of that today, but I also enjoyed just following a lot of my normal flight lines and doing the tricks I’m comfortable with. I just really enjoyed my stick time, and I’m glad that taking a short break has helped recharge my interest.
I realized recently I was starting to get a little bored by about my 4th or 5th battery of a session. I’m used to that happening over the winter when I’m stuck flying in-doors, but I’ve not had that happen when I’m able to be outside before. I’m guessing it’s just because I’ve just been flying my yard for the last couple of months since the pandemic started, whereas I’m used to going to a nearby fields and schools to get a change of scenery. I probably could still do those things, but it just seems a like an unnecessary risk to take no matter how insignificant.
Thinking on it more, I’ve been subconsciously feeling this for a few weeks now and just hadn’t realized it until now. I’d started flying my whoop outside along with my toothpick, and I think that was my way of trying to mix things up a bit.
Besides just flying the same small space over and over again, I’ve also still been in that winter/spring mindset where I feel like I have to get out and fly whenever the weather is decent, and there’s been a lot more of that recently as our weather here has started to shift more into summer than spring. So I’ve been pushing myself to fly as much as possible when the weather is good and feeling guilty when I don’t, instead of resetting my expectations for the bad weather days being the exception rather than the norm.
The biggest issue though has been how I fly. I don’t have any kind of goals or plan or structure to my sessions right now. Last summer and fall, I was all about practicing tricks and trying to get more comfortable in the air. This year I started out doing some of that by trying to get more comfortable doing loops and lookbacks where I have to be upside down, but recently I’ve just been doing mostly the same comfortable things repeatedly with some minor changes like starting to do more low to the ground proximity flying.
To correct that and get out of the rut I’ve gotten myself into, I’ve tried to become more intentional with my flight sessions. I’ll take a battery to warm up where I just do my normal messing around, and then for the next couple of batteries I’ll pick a maneuver or trick that I want to work on and just do that over and over for most of the pack.
For example, I’ve noticed recently that I tend to turn left most of the time. Probably 98% of the time that I do a dive I go left. Same for yaw spins. For rolls I’ve noticed I most often go right for this and for flips I pitch backward. All of these has to do with the stick movements. I fly what’s known as Mode 2, which most pilots do in the US, and that puts the yaw and throttle on the left stick and pitch and roll on the right stick. So yawing left means pulling the stick to the outside of the controller, as does rolling right.
Somehow I’ve gotten more used pulling the sticks than pushing them towards the center. So that’s a big part of my practice now is forcing myself to reverse the way I do tricks and the flight lines I pick to get more used to yawing right, rolling left, and pitching forward. It’s almost a different kind of boredom, zipping back and forth across my backyard doing yaw spins one way five or six times and then doing them the other direction. But in other ways it feels good, as I can feel how uncomfortable I am when doing things differently and I definitely don’t want to be.
Wednesday last week we had some good weather and I was able to wrap up work by 5 pm, so I charged up six batteries and headed out to the back deck to fly. I was having a pretty good session, doing a little bit of racing flying different circuits around the house and yard, doing some freestyle as well, just generally having fun and not really trying to work on anything in particular.
I started really having fun on to run my loops around the backyard that I used to do with my whoops, and found doing it with a bigger quad is pretty exhilarating. It’s a lot faster and the space feels tighter even though my toothpick quad isn’t that much bigger. I was getting pretty good too at finding different lines to follow. Trying for smoother lines each time around while mixing in a little freestyle here and there as well. It was a lot of fun.
Then I bonked the tree in the front yard. I thought it was pretty minor at first since I was just banking to do a 180 around the tree and go back the other way. It’s something I’ve done hundreds of times with no problem, except this time I pulled it up too short and hit the tree trunk. Not very hard, but I wasn’t able to recover it, so I had to do a walk of shame out front to get it. Which is when I discovered the broken prop on the front right motor, and that explained why I couldn’t recover and take off.
No big deal, I replaced the broken prop with a new one and tried to take off and finish the rest of the current battery. But when I armed it I only had three props spinning. The front left motor wasn’t working.
I disarmed the quad and spun that motor by hand, but it wouldn’t turn freely. It felt like something was catching, and I figured either the bell was bent or the magnets or stator might have gotten damaged inside. I was pretty surprised I had motor damage though, I didn’t think I’d hit that tree hard enough for that.
So that was the end of my session for the day. Later that evening I took the prop off and got the motor pulled out of the quad in preparation for replacing it. Out of curiosity I took the tiny clip off of the bottom of the motor so I could remove the bell and see what the actual damage was. That was when I discovered that there wasn’t any damage just a tiny grain of dirt or sand stuck in between two windings on the stator which must have been sticking out just enough to catch on the magnets inside the bell. I pulled that dirt out with a pair of tweezers and put the bell back on to test it and the thing spun just as smoothly as when it was new.
While it was unexpected and great that I didn’t need to replace the motor, I’d lost the clip while getting it apart. At the time I didn’t care because I wasn’t expecting to be able to put it back on the quad, but now I needed that tiny clip to keep the motor together. There was no way I was finding a tiny black piece of metal like that in my carpeted office though. Luckily I’ve been keeping all my broken parts including motors in a box, and I was able to get the clip off of one of them and use that one the motor.
This was a first for me. I normally end up just replacing parts, I’ve never been able to fix something and put it back on. Once I got the motor back on, I plugged a battery into the quad and tested the motor out and it worked great.
As a side note, the 2″ tri-blade props I’d switched to once I ran out of the 65mm bi-blades have proven to be a little too brittle. I broke too many clockwise props and didn’t have any more replacements, so I dropped back to some 1.9″ ones that I’d bought an never used. I’m going to need to order some new props though at this rate.
Here’s the full flight just to prove I don’t just crash all of the time.
It was a nice day and I was flying from my backyard while the kids’ were playing on their trampoline. I’d just started my fourth pack and was flying around the front of the house when my nose started to itch. What I should have done was landed to take care of it, but what I actually did was try fly one-handed and take care of it. I believe the words “real quick” passed through my mind. I ended up with me drifting into the side of the house, bouncing off, and crashing.
I knew I was in for some problems though because right after that the feed to my goggles went blue. I’ve never had that happen before. That can only be bad though.
Static usually means that the VTX is dead. A black screen with the on screen display means there’s a problem with the camera. But a blue screen was new to me, so I wasn’t sure what the problem was.
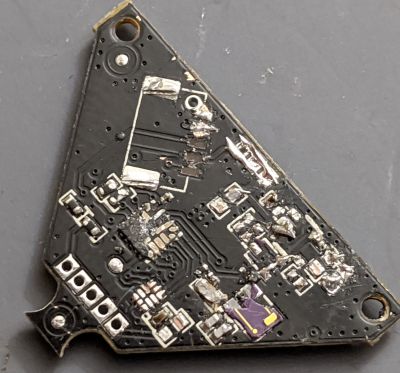
I tried unplugging the battery and plugging it back in, but got the same blue screen in my goggles. Taking off the canopy, I didn’t see any damage to the wires from the flight controller to the video transmitter or from the VTX to the camera. I tried the battery again with the canopy off and didn’t see any difference. Taking the VTX out of the canopy didn’t help either. I accidentally notice that if I squeezed the VTX between my thumb and index finger the picture would pop back in briefly. So I started looking more closely at the board and finally figured out the problem.
The red arrow is pointing to a tiny brown and silver rectangle. That’s a capacitor. Here’s a closer photo.
Another one with tweezers included for scale.
So the crash had knocked that capacitor partly loose. Whatever it’s purpose it was allowing the VTX to transmit enough that my goggles were picking up a signal but not actually sending any OSD or the camera image. It was also far, far too small for me to try to resolder. I did try to put some liquid tape over the area, thinking that might hold it in place, but it was so small that just putting that on the board moved the capacitor.
I’ve really had a hard time with this A01 VTX. More so than anything else that came on the HX100 originally. But I’m not sure I can blame this one anything other the me being stupid and having to bad luck to crash into a landscaping timber. Regardless of the cause though I was ready to try something else.
I’d never been a fan of the soldered on antenna connection for one, especially since it came with a dipole antenna and I used left-hand circular polarized antennas on my goggles and my whoops. So this was a change to upgrade the VTX antenna as well as the VTX itself.
I’d been pretty happy with the Eachine Nano that I’d used in my brushless whoop build, and had bought a second one as a spare, so I decided to use that as a replacement. The trick was figuring out how I was going to mount it in the quad since it’s rectangular shaped and wouldn’t mount in the canopy in the same way. I also didn’t want to try to stick it to the flight controller with double-sided tape. After a bit of fiddling around trying to decide how to mount it I had the idea to strip all of the components off of the old A01 VTX board, mount it in the canopy, and then stick the new VTX to it.
I had to rewire things a bit since the new VTX didn’t have a camera passthrough on it like the original one. So I could run the 5V and ground from the VTX to the camera, but had to splice in a new wire from the camera to the flight controller (the yellow to blue signal wire below).
Once the new wiring was figured out, I just had to solder everything back onto the flight controller, which by this point is pretty routine for me. Plugged in a battery to test that I could see a picture in my goggles and that I was able to change the VTX band, channel, and power from the OSD. Then I put heat shrink on the VTX to both isolate it electrically from the old VTX I was going to mount it to and also to hold the antenna on. This board uses a UF.L connector which is very light but isn’t the most secure, so I like to have the heat shrink on it to help make sure it doesn’t go anywhere.
That did require an update to my canopy mod though, since the new antenna wouldn’t fit through the old hole that I’d drilled. So I clipped the end just a bit to allow the antenna to slip through. I debated drilling a hole through the end that I could zip-tie shut, but so far it’s seemed pretty secure without it.
So now I have a further modified HX100. I think at this point maybe one or two motors, the canopy, and the camera are the only original parts. Most of the problems I’ve had with it have been due to crashes and my own stupid mistakes. It’s definitely been my favorite quadcopter to fly.
The other day I was charging up some batteries to fly and was surprised when a ground lead snapped off of its XT300 connector when I was pulled it off of the charger. That’s bad because one it couldn’t fly it and two I’d just finished charging it up so the battery was at it’s most dangerous.
I checked the rest of the batteries and noticed that there was one other one where the ground lead wasn’t stiff at the XT30 connector like it should have been. It hadn’t come loose yet, but I figured it would soon. I left it alone at this stage though so I could fly it and run the battery down.
I joked online about resoldering the connections, but I never seriously contemplated doing that. I’ve soldered a lot of XT30 connectors but never where the wires were attached to a battery. It’s possible to do, but you have to be careful about getting the wire too hot and damaging the battery’s wiring connecting the cells together or worse damaging the actual cells and potentially causing one or more to fail. Batteries are cheap enough that I’d rather just replace one than risk causing a fire trying to repair one, especially one that I’d been flying for months and pretty much had gotten my money’s worth on anyway.
It did make me realize a bad habit I’d picked up though. I’ve gotten pretty used to using the leads to disconnect XT30’s either from the quadcopter or from charging boards. I don’t know for sure that my habit was the sole cause for those two battery leads breaking, but it’s likely that it contributed. I have four more from that set that are all fine, but I’ve still tried to be better about using the plastic housing on the XT30 and the balance plugs to disconnect rather than grabbing the wires.
Disposing of batteries requires discharging them down to zero, and that’s a bit of a trick as most battery chargers that have a discharge setting won’t go below 3.2 volts as that’s usually the absolute minimum before damage will occur to the battery. So while I could discharge both batteries down to 3.2 volts, I couldn’t get them to zero and so safe to take to recycling without making something.
There are a few different ways to completely discharge a battery that carry varying amounts of danger with them from the completely safe and very slow saltwater bath to the very dangerous and not smart puncturing the cells with a nail. I opted to a fairly safe and fast method of using light bulbs. The only danger here is the heat that the bulbs generate while discharging, but that’s easily managed by hanging it off of the edge of my desk.
One thing I didn’t want to do though was just solder a bulb to an XT30 connector and leave it at that since eventually the bulb would need to be replaced, even if it would probably take a long time for that to happen. I found a set of bulb sockets on Amazon that looked like they would work pretty well along with some Halogen bulbs.
After that it was just a matter of soldering an XT30 connector that I could plug batteries into and soldering that to one of the bulb sockets, which I decided to shorten as much as possible to limit the amount of current traveling through those thinner wires.
Once I had it soldered and heat shrink over the connections I was able to test it out on the battery where the ground lead hadn’t quite come loose yet. I tried to keep a battery tester on it but since I’d flown that battery after charging it, it was already down to about 3.5 volts and once it went below 3.2 volts there wasn’t enough juice for the tester to run.
The other battery required a little extra effort to discharge. My multimeter came with a set of cables, one red and one black, that had alligator clips on the ends, and I was able to use one of those to connect the ground lead to the XT30 connector. That seemed much safer to me than trying to hold the wire against the connector with a pair of pliers. Thankfully it didn’t take long for the halogen bulb to kill the battery, but it did produce a pretty impressive amount of heat. I could feel it just by holding my hand over the bulb, and I’m sure it was hot enough that I would have gotten a nice blister if I’d have touched it. It did cool off afterwards quite quickly though.
After killing both batteries I cut the leads and balance plugs. The trick with this is not to cut both wires at once which would short them out. It shouldn’t matter since I’d discharged both batteries down to where the bulb wouldn’t light but that didn’t necessarily mean they were at zero volts, it was just too little voltage to light the bulb. It’s just a good habit to havy anyway.
I gut the red wire short since the black ones were both snapped off at the lead. That way the wires can’t come into accidental contact like they might if their lengths were similar. Then I taped all of the wires to the battery just to make sure that nothing could come in contact with the wire ends. It’s probably overkill, especially for a relatively small 2S battery, but I’d prefer to err on the side of caution.
Discharged and taped up, I put them aside for the next time I’m near the battery recycling center for disposal.
When troubleshooting a quad problem or when getting a new build configured, I’m regularly plugging in a battery to a quad to power the motors, VTX, and receiver, and then unplugging it again. I don’t like to leave the battery plugged in any longer than necessary since the VTX can quickly overheat and damage itself. They’re designed with the expectation that the quad will be moving and getting a lot of airflow to cool off. Even with the VTX set to it’s lowest power of 25 mW, I’d still just prefer not to leave it powered any longer than necessary.
So that means dozens of cycles of plugging in an XT30 connector and then unplugging it again, which quickly becomes tedious and hard on the finger tips.
With my HD toothpick build coming up I was thinking about this, and realized I could get an in-line switch and add XT30 connectors to either end as a way to easily switch the battery on and off. Even better since that could also plug into my smoke stopper as well.
I did a little research on Amazon and settled on these inline 250V 10A appliance switches. I would never be drawing anywhere near 10 amps while powering a quad on my bench, so it seemed more heavy duty than I’d need but I always like to be extra safe when dealing with electricity. When they showed up I was pretty happy with the quality of the housing and the hardware inside.
Making the switch was pretty easy, there was no soldering to do for the switch itself, I just had to make the XT30 male and female ends, which is a very easy soldering project. I cut some 14AWG silicone wire to what I thought was a decent length and laid out those with some heat shrink, the switch, and the XT30’s just to try to get everything straight in my head and make sure I’d thought it all through.
Soldering the XT30 connectors only took a few minutes to do, and I also went ahead and tinned the wire ends that were going into the switch just to make sure that the wires were as durable as possible.
Then it was just a matter of connecting the wires inside the switch keeping the positive and negatives lined up correctly. Except I found on my first test that plugging in the battery, the switch was live in the off position and the led light wasn’t working. I had to take it apart and swap the sides for the male and female connectors.
For the second test the switch worked as expected except that the LED wouldn’t come on. I tried a different switch with the same issue. So I’m not sure if the LED’s are just set for a higher voltage like you’d get from a house line or maybe it’s an AC versus DC thing, but the switch part worked like a charm which was the important part for me.
For such a simple and easy project, I think it’s going to make a world of difference the next time I’m trying to bind a receiver and I have to press a tiny receiver button with a pair of tweezers while simultaneously plugging in a battery. Something which really requires an extra person to do without swearing, and now should be pretty easy to do with just two hands.
Despite having a couple of projects in mind, I haven’t been doing much over the last two weeks except flying. With everyone stuck at home, I’ve just been sticking to my yard which is kind of limiting, but after being stuck flying whoops indoors for the winter having decent weather now to get outside regularly is a treat even if I can’t get to a bigger field or go over to the nearby elementary school’s parking lot.
I started practicing proximity flying a lot more, which just means flying close to objects and trying to hit smaller gaps. I have a loop in my backyard that I like to do with whoops that I started trying with my toothpick and while I’ve been getting better at it, I have had a couple of collisions. My favorite so far was then I was trying to skim our fence line and caught a board. I couldn’t manage this again if I tried.
While that collision didn’t do any damage, I whacked the bird feeder that we keep hanging from my kids’ playset that ended up breaking a motor. I’m honestly surprised about how much damage it did compared to some of the other collisions and crashed. It might be that was one of the older motors on the quad, since I don’t keep track of which was which when I’ve done rebuilds but that’s probably something I should be better about doing. It might have just been the speed I was going. Regardless, I broke the bell again and had to swap the motor out.
I recorded myself doing the motor repair and experimented to making a timelapse of it that I posted online. Normally I use YouTube for anything longer than what will fit on Twitter or Instagram as a clip, like this one of the 30 seconds before the crash.
But I hadn’t realized I could post videos of 10 minutes or less to Instagram’s TV service and it would show up in my regular feed. While I always try to post things to both Twitter and Instagram, I’ve noticed that on Twitter I normally get feedback from my friends and on Instagram I get more feedback from other FPV pilots. Which was why I was excited by the IGTV find because I can post YouTube links on Twitter but not on Instagram. So I was able to put the timelapse motor repair on both YouTube/Twitter and IGTV and it was interesting to see how different the audiences were on both platforms.
Approaching Twitter and Instagram from the point of view of a content creator has been very new to me. I’ve always used both platforms to just share things and interact with friends that I already have, but as I’ve been doing more quadcopter stuff I’ve been trying to use hashtags and things to try and reach a broader audience.
Besides getting a bit better at Instagram, I’ve done a couple of experiments with Twitch streaming. I did two rough test streams and then a longer one where I did about 10 batteries and posted online when I went live. I had a receiver that I could connect to my tablet via an USB cable and then capture and stream the quadcopter camera feed using a Streamlabs app. That all worked better than I expected from a technical standpoint. It even looks like I could add the front facing camera on the table to show me wearing the goggles when I’m flying, but I haven’t tried that yet. I’m not sure about Twitch as a platform for sharing FPV flying though, as I can’t interact with chat while I’m flying. I can try to catch up on messages in between batteries though, which would mean about 3-5 minutes of flying followed by chatting for a couple of minutes and then flying again.
It’s an interesting idea and something I’m going to try again soon, along with doing more videos for Instagram and YouTube.
The longer I fly quads, the more comfortable I get, and the more risks I start to take. As a result I end up crashing a fair bit, not as often as when I first started, but these crashes involve more speed and end up causing a lot more wear and tear on my quad. For example, here’s photos from 3/14 and 3/23 just over a week apart.
The props are so shiny and smooth with clean edges in the one on the left, whereas the one on the right has been crashed a few times and the props have whacked tree branches, pavement, and the gutter along the edge of my garage. The frame has taken some serious frontal hits and started to split a bit on the end of one of the arms. You can also see a scratch on the motor bell too.
I’ve found that I’m taking a fair bit of pride in how used it looks after about a week of flying. It means I’m pushing myself trying to get better. Taking risks. Crashing doesn’t scare me at this stage since I’m getting enough experience with repairs that I don’t think there’s anything I couldn’t replace in it. In fact, thinking about it now, I think there’s probably two motors that are original, plus the canopy, and the camera. Everything else the frame, the flight controller, the video transmitter, and the receiver are all upgraded or replacements.
All that said, I’ve been grounded the last few days because of the weather. We had a couple of days of rain, and I thought I was going to be able to fly on Sunday but I hadn’t realized that we were in for 30 MPH winds. That’s too much for me to handle for yard flying when I might catch a gust at the wrong time and hit my house or worse the neighbor’s. I was almost able to sneak in some time on Thursday last week but it literally started raining as I walked outside to set up, so I had to turn around and go back inside. Rather than just discharge all my batteries and give up through I used them to charge up a set of 1S batteries and flew my whoop inside. It’s not quite the same but it’s still fun.
When I first got into flying I was using a whoop style quad that flew on a 1S LiPo battery, which means a single celled lithium-ion polymer battery. The kit I bought came with a small USB charger that would handle up to four batteries and took quite a while to charge them completely.
I soon upgraded to a parallel board that would do six batteries and had a DC wall converter that would handle 3 amps, USB 2.0 caps out at 0.5 amps for comparison. It was much faster and better but it couldn’t do one important thing. After flying, I basically had to charge the batteries back to full, and Lipo batteries have a much better longevity if they’re left charged to what’s called storage voltage, basically about half way charged at 3.8 volts and about 30-50% capacity. Technically I could keep an eye on the charger while it was working and stop it once the batteries hit storage voltage, but sitting and watching batteries charge is not any more fun than watching paint dry.
Unfortunately there weren’t any chargers on the market at the time that would do storage charging for 1S batteries. I was looking at a charger geared for higher cell-count batteries anyway as I already knew I was going to be getting into bigger quads, and I happened across a forum page that talked about making an adapter cable to charge 1S batteries on multi-cell chargers. The adapter works by combining all of the 1S connectors in series to make the individual batteries look like cells in a single battery to the charger. It didn’t look too hard and would be a good way for me to practice soldering.
To make one I needed 1S female connectors, silicone wire, a balance lead, and an XT60 power connector. The number of 1S connectors depended on the size of the balance lead. I went for a 6S to be able to charge as many 1S batteries at a time as possible. This did mean that I couldn’t just charge one or two batteries on an adapter like this, I’d always have to do six at a time and all six needed to be the same capacity.
Soldering these up in series involved soldering the red wire on the yellow XT60 connector and the red wire on the balance lead to the red wire of the top-most 1S connector.
From there it was just a matter of connecting the next black wire on the balance lead to the black wire of the 1S connector along with the red wire of the neighboring adapter, and repeating across all 6 balance lead wires until getting the the last one where the black wire of the XT60 is included in the solder joint as well. It was an ideal project for someone getting into the hobby and needing practice soldering. Especially when I forgot to slid the heat shrink over some wires before soldering them, so I’d have to desolder the joint and redo it with the heat shrink in place.
The last stage was to add some heat shrink over the whole adapter. This last bit isn’t to electrically isolate any solder joints, but just to bind all of the wires together and make the adapter easier to use.
Balance chargers like my HOTA D6 Pro Dual use the combination of the power and balance leads to make sure that all of the individual cells in a battery are charging evenly. This let me treat six 1S 300mAh capacity batteries as a single 6S 300mAh capacity battery and more easily charge, storage charge, or even discharge batteries than any of the options I had at the time.
Just recently there’ve been parallel charging boards that have come out that will do 1S batteries by adding a jumper from a balance port to a power port. This loses one spot on the parallel board but it means that the charger treats the batteries as a single 1S battery with five times the capacity, so the charger can push more amps and charge the batteries faster. It also isn’t limited by needing exactly six batteries like my original cable so I can charge anywhere between one and five batteries, since the sixth slot is take up by the jumper.