One thing I’m still not good about with flying quadcopters is checking my drones before and after I fly them. I’ve built up some excellent habits around taking care of my batteries. I don’t charge faster than 1C. I try to charge as close to when I’m going to fly as I can. I charge or discharge batteries back to their storage voltage when I’m done. But somehow I have a blind spot when it comes to the quad itself.
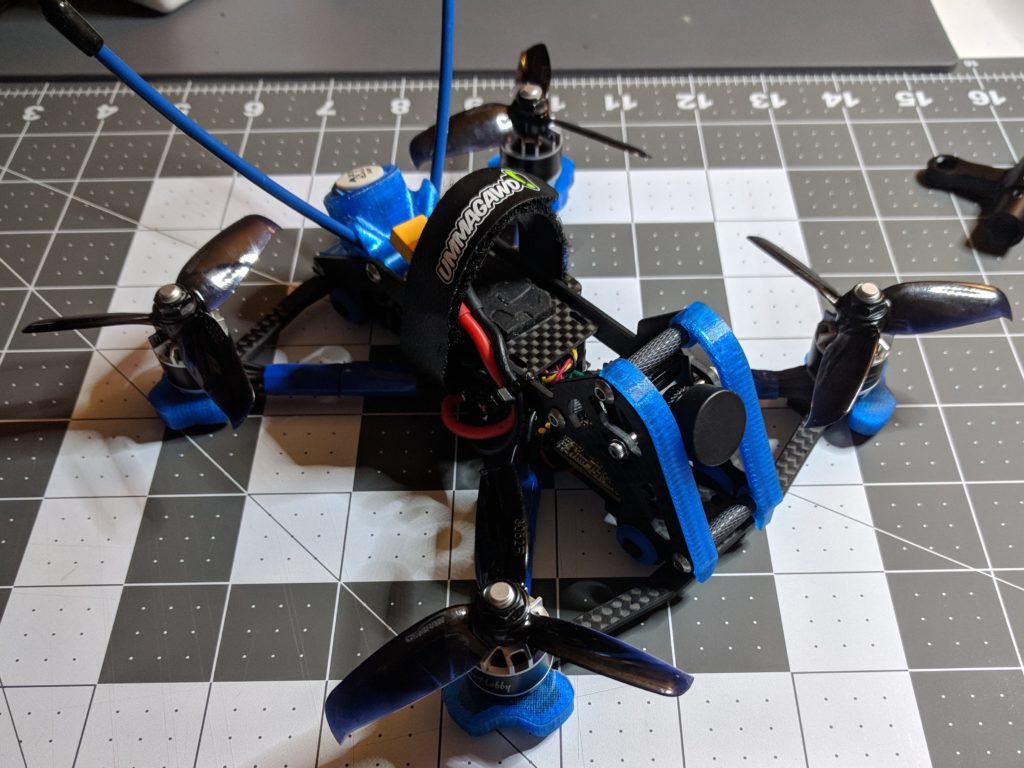
Case in point is the picture above, which was taken during a flying session after I’d already flown one battery. Possibly the nut was still on before I flew but it had to have been pretty loose to come off completely while I was flying. The part that really illustrates my bad habit though, is that I was putting a new battery on to fly again and only noticed the canopy was loose then I was setting it down to take off. Inspecting it then I realized that the nut on the bolt that secured the flight controller had also nearly come off as well. You can see it on the picture below just to the right of the standoff connecting the canopy to the frame.

Now likely the only really bad thing that would have happened if I had taken off with it is that the video feed would have had a lot of jitter in it with the loose canopy. Even if the nut on the flight controller bolt had come off during flight, there’s still three other bolts securing it down, and the nut itself is nylon so nothing would have shorted out or been damaged. But it’s a symptom of a bad habit of mine not to pay more attention to my equipment, and it’s a bit like driving without getting your oil changed.
I just don’t normally think about the wear and tear that’s happening while I’m flying. Once I put one together and start using it, I’m always surprised when it breaks or needs upkeep or stops working as a result just regular use. Obviously after crashing into something I would expect there to be damage, but I don’t think about what all of the vibration is doing to the fasteners on the quad while it’s in the air.
Besides this incident, I’ve also wrapped up flying before and noticed I was missing a screw from one of the motors. Which would be okay if it was because I was doing an inspection after flying, but it was just happenstance just like this instance with the canopy.
I’ve gotten a little better since then about checking the quads over before I fly, but it’s not really become an ingrained habit yet. I’ve considered making up pre- and post-flight checklists to go through, but that really feels like overkill for flying tiny little quads around. I still might at least for the short term just to help get the habit ingrained. Maybe once I have a crash or a motor drops off midair, I’ll start remembering to check things before I fly.